常州杰胤工业自动化
常州市杰胤工业自动化科技有限公司
Changzhou Jieyin Industrial Automation Technology Co., Ltd
15261168588
Changzhou Jieyin Industrial Automation Technology Co., Ltd
15261168588
在汽车焊接车间里,工人需要30分钟手动拆卸焊枪、安装搬运吸盘;3C电子工厂中,因产品迭代导致每月需调整夹具200+次……传统人工更换夹具方式面临三大瓶颈:1、时间长:单次换型需15-60分钟,影响OEE设备综合效率

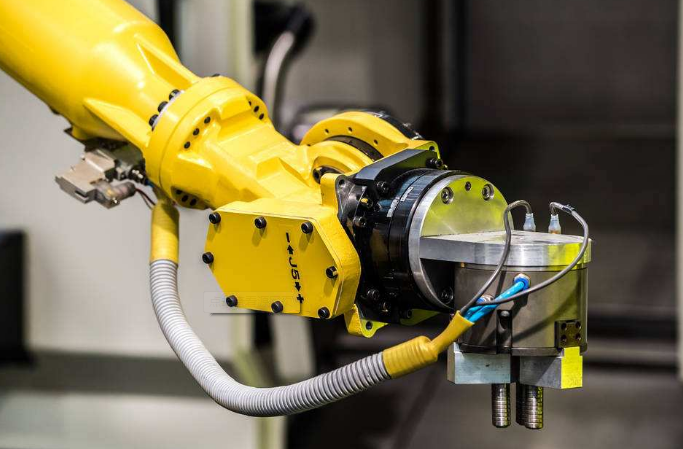
近日,常州杰胤工业自动化有限公司正式发布机器人工具快换盘全系列解决方案,产品覆盖轻载5kg到重载3000kg多种规格,广泛适用于3C电子、汽车制造、金属加工、注塑、打磨焊接、装配线等多工位、多任务的工业自动化场景。

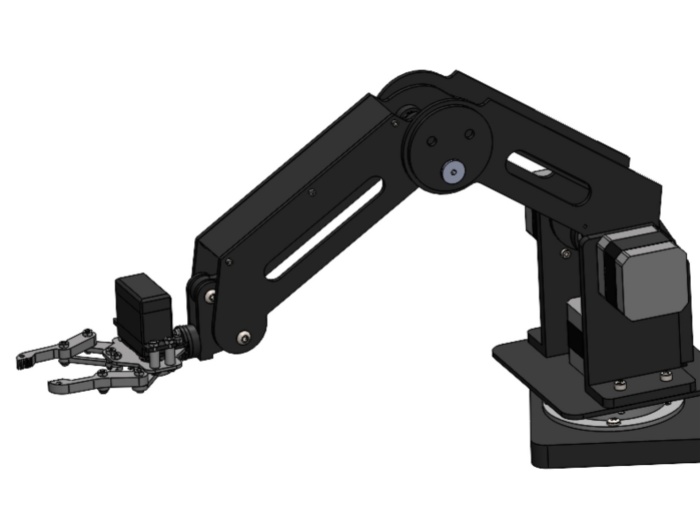
机器人去毛刺打磨抛光力控工具是一种安装在机器人末端,用于自动化去毛刺、打磨和抛光作业的设备,可让机器人实现 “柔性” 操作,提升加工质量和效率。其工作原理、核心特点与应用场景如下:
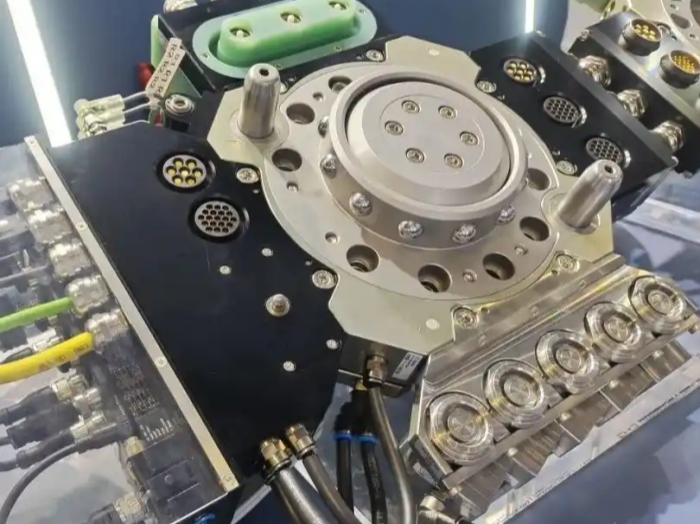
长期以来,传统机器人快换盘在数据传输方面存在明显短板。以往所依赖的通信协议,多数面临传输速率低、延迟严重的问题。据行业数据显示,传统快换盘的数据传输延迟普遍处于 5-10ms 区间。在精密制造、3C 产品生产等对时效性与精度要求极高的领域,这一延迟足以引发一系列生产问题。例如,在芯片封装环节,机器人需在极短时间内精准抓取芯片并完成封装操作。一旦数据传输延迟,机器人接收指令迟缓,导致抓取位置出现偏差
在工业自动化浪潮中,末端机器人夹爪正成为智能制造的关键一环。从汽车装配线上的精准抓取到食品分拣中的柔性处理,这些"机械手"正在重新定义生产效率的边界。最新数据显示,2024年全球机器人夹爪市场规模预计突破50亿美元,年增长率高达25%。
磁性快换技术的成功应用,为工业自动化带来多重变革:减少机器人闲置时间,单台设备利用率提升30%;适应新能源汽车定制化需求,快速切换产线任务;预计2025年该技术将推广至3C、仓储物流等领域。
与传统工业机器人相比,协作机器人对末端工具的要求更为严苛:不仅要具备高精度、高灵敏度,还必须保障人机协作的安全性和柔性。为此,越来越多的末端工具集成了力控感应器、快换装置、软性材料等先进技术,甚至可实现自动感知抓取力、自适应形变、快速换模等功能,大幅提升作业效率与灵活性。

选择一款可靠的浮动补偿装置,就是为智能制造加上“柔性大脑”。杰胤始终致力于为客户提供更智能、更精密、更高效的末端解决方案,助力每一条产线降本增效、平稳升级。欢迎联系我们,获取更多产品详情与应用案例!

在现代智能制造和自动化生产中,协作机器人越来越频繁地出现在工厂车间、仓储物流、3C装配甚至医疗服务领域。它们之所以能“上得了流水线,下得了手术台”,关键在于其末端工具带来的强大适应性和多功能性。那么,协作机器人常见的末端工具都有哪些?常州杰胤工业自动化小编为大家来逐一盘点。

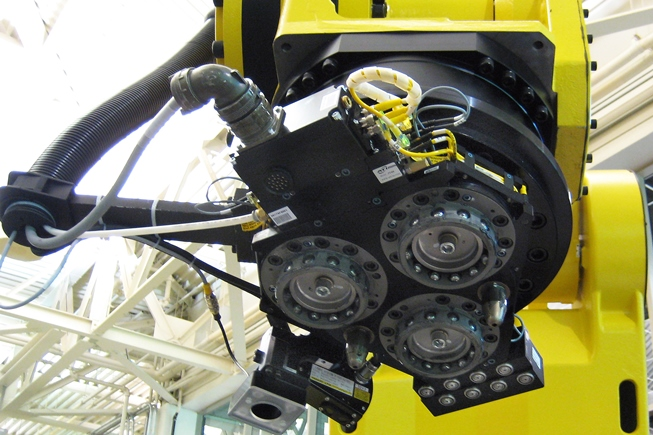
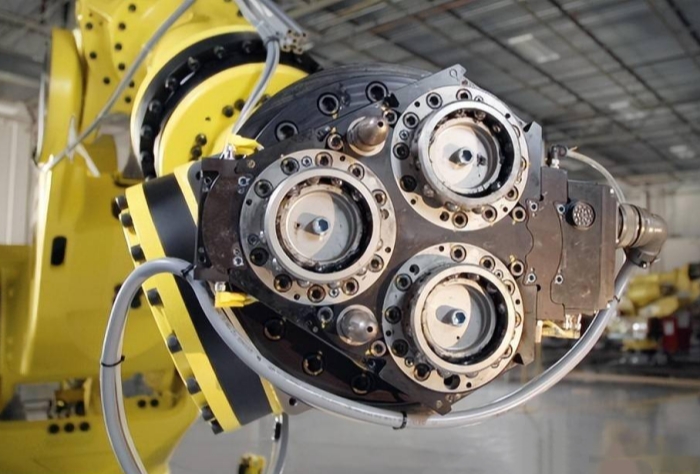
传统机器人换工具需要人工干预、螺栓拆装,不仅耗时耗力,还存在对位不精准、误操作等风险。快换盘的出现,彻底打破这一瓶颈。机器人快换盘通过气动、机械或电动夹持系统,实现工具与本体之间的自动连接与断开。一个信号指令,机器人即可在数秒内完成焊接头、抓取器、打磨机等不同末端工具的切换,真正实现“即插即用”。
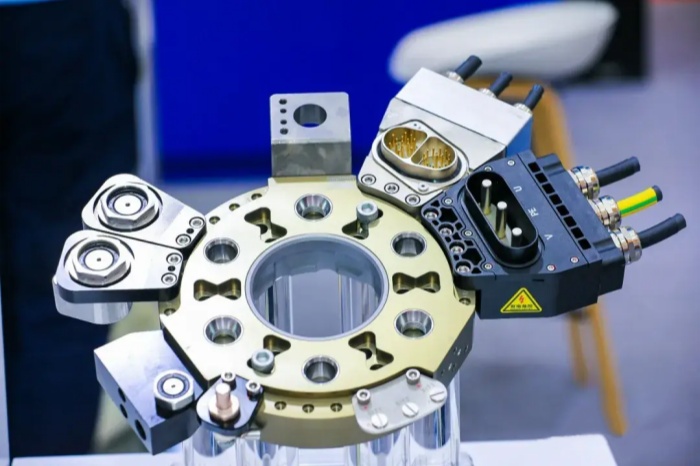
近日,常州杰胤工业自动化有限公司推出新一代机器人快换盘系列产品,具备高精度定位、快速对接、多介质集成等优势,能够大幅提升机器人转场效率,实现真正的“一机多用、柔性制造”。
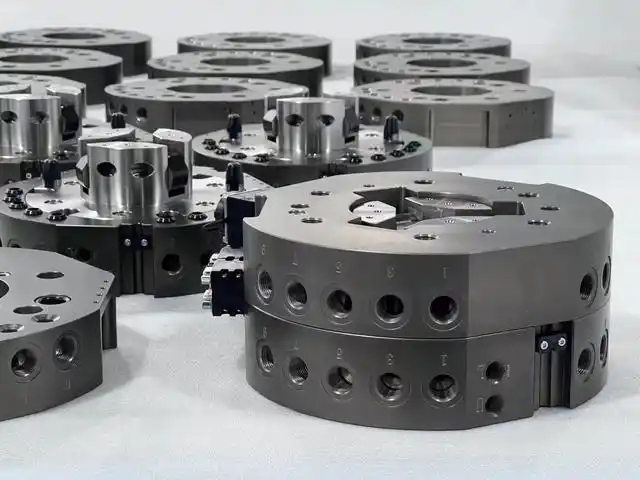
随着智能制造的持续推进,工业自动化对生产效率与柔性化提出了更高要求。作为一家专注于自动化连接部件研发与制造的企业,常州杰胤工业自动化有限公司近期推出的新一代机器人快换盘系列产品,凭借高精度、高重复定位性与模块化接口设计,广泛应用于多任务切换的自动化系统中,受到客户广泛好评。
